


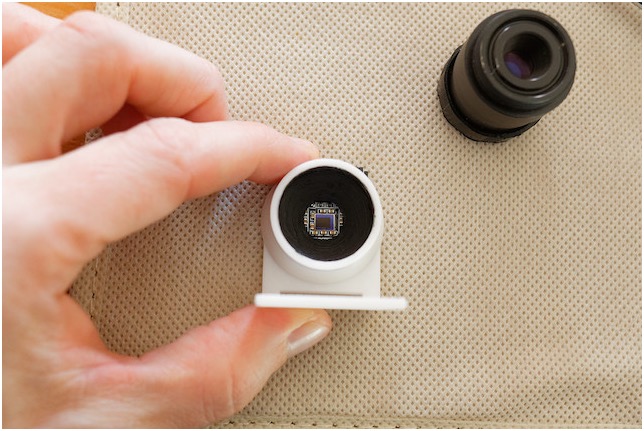
Masque anti aigrettes pour le CN-212
Alors l’œil à l'oculaire disparaitre tu les verras.
Newton ou lunette visuellement plus tu ne sauras.
Quoi suis-je?
Le masque anti aigrettes!
La manip est inspirée de l'article de Serge Bertorello:
http://serge.bertorello.free.fr/antiaigr/antiaigr.html
Et hop! Directement du concepteur au consommateur...





Plus qu’à tester sur le ciel. :)
Edit: résultat en demi teinte pour cette première version. Les aigrettes disparaissent bien mais au profit d'une « boule à facettes » pas forcément très esthétique...

Noir c'est noir! Il y a de l'espoir... lali... lala...

L'écran tactile de mes rêves...

Sur la base de cette écran, mon idée est de réaliser une raquette de commande qui ressemble un peu à une console de jeux portable en format paysage. L’écran est piloté par un Arduino Due 32 bits ARM afin d’offrir plus de liberté qu’une carte Arduino MEGA. Avec 84Mhz et 96Ko de SRAM le Due est l’Arduino le plus puissant du moment. Je vais pouvoir faire des folies!
Après la Nintendo Switch voici la naissance de l’Astro Switch... ;)


La puce GPS de l’ancien prototype va être réimplantée dans la raquette...
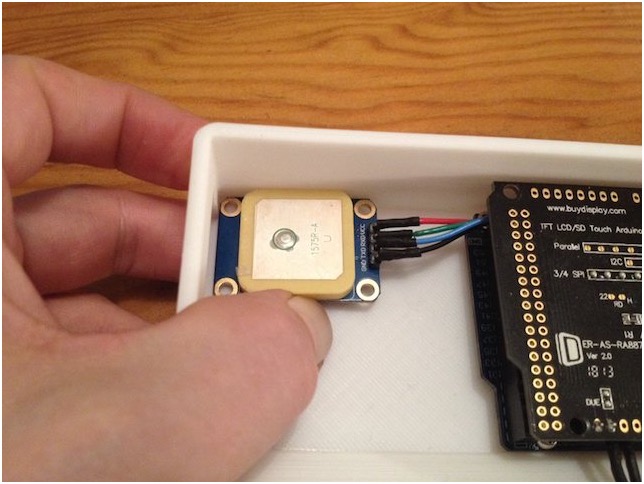
Un aperçu de l’adaptation de l’abaque numérique de l’EM-10 calé sur les données de la puce GPS (lumière bleue à l’intérieur du boitier)...

MKS MINI aux commandes...
https://www.youtube.com/watch?v=ckrY5U3mfkkLe projet a bien évolué depuis ses débuts. Simplifions, simplifions, simplifions! Reste à intégrer une led d’éclairage pour le viseur polaire, prévoir une connectique pour le câble de la motorisation de la mise au point et ajouter la deuxième connectique DB-9 pour la future télécommande tactile. A partir de là on sera pas mal niveau matériel côté monture.

Test motorisation mise au point du CN-212
Vref pour MKS MINI V2.0
I = Vref / 0.8.

Documentation Makerbase: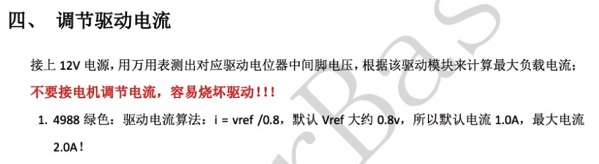
Traduction:
« 1. Algorithme actuel du driver 4988: i = vref /0.8.
Vref par défaut est environ 0.8v.
Le courant par défaut est 1.0A. Le courant maximal est 2.0A. »
Source: https://github.com/makerbase-mks/Datasheet/blob/master/Chinese%20datasheet/MKS%20MINI%20V2.0%20数据手册.pdf
Motorisation de la molette de mise au point du CN-212
- ne pas toucher au tube: le système ne doit nécessiter aucun perçage.
- facile à monter/démonter en quelques secondes et sans outils dans le noir en cas de besoin.
- on doit pouvoir continuer à utiliser la molette en manuel.
- cela ne doit pas dénaturer le télescope. :)
On mélange tout ça avec OpenSCAD et -quelques prototypes plus tard- abracadabra...

Le concept est simple. La platine est solidarisée via le porte oculaire. Et un manchon, ajouré pour accueillir l’axe moteur, vient s’enficher sur la molette de mise au point.

Le tour est joué...



Voilà qui devrait être parfait pour boucler la boucle en complément du contrôle de la monture.
C'est reparti... :)
Donc on récapitule:
- revoir l’électronique de la monture pour qu’elle soit plus simple à concevoir et pourquoi pas encore moins chère?
- déporter l’écran dans une raquette déportée.
- prévoir de piloter la mise au point.
Ok on en est donc là ou presque puisque j’ai déjà avancé sur la question vous vous en doutez. :) Concernant l’électronique, je pense avoir trouvé mon bonheur avec une carte pour imprimante 3D que je vais hacker pour mon usage: la MKS Mini V2.0 Makerbase.
Elle a tout pour me plaire:
- basée sur un Arduino MEGA dans la continuité de mon projet.
- dimensions relativement compactes.
- 4 drivers 4988 afin de piloter à la fois les deux moteurs pas à pas du télescope et potentiellement deux autres périphériques.
- technologie éprouvée puisque dérivée de la Mks standard équipant nombre d’imprimantes 3D DIY.
- tout petit prix: à peine plus de 20€ avec les frais de port sur aliexpress.com.
Il n’en fallait pas plus pour me lancer sur cette piste!
Je vous présente donc mon nouveau prototype déjà installé en bonne place sur ma monture (merci l’impression 3D)... :)



La manette SEGA a été conservée et j’ai prévu un second port DB9 pour la raquette de contrôle qui exploitera l’ancienne carte Arduino équipée de l’écran tactile. Ce dernier s’occupera de l’intelligence (base de donnée, GPS, GOTO, abaque polaire) et la carte Mks s’occupera des moteurs et du PEC.
Sunny: de la réalité à la simulation

Sunny: le petit traqueur solaire


Plutôt cool, non? :D
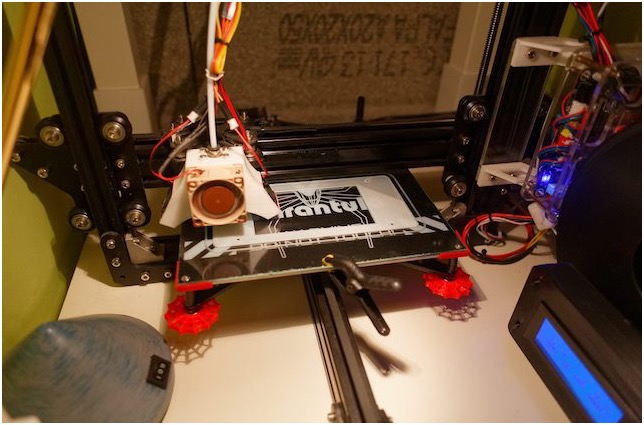
TEVO Tarantula - Benchy 3D
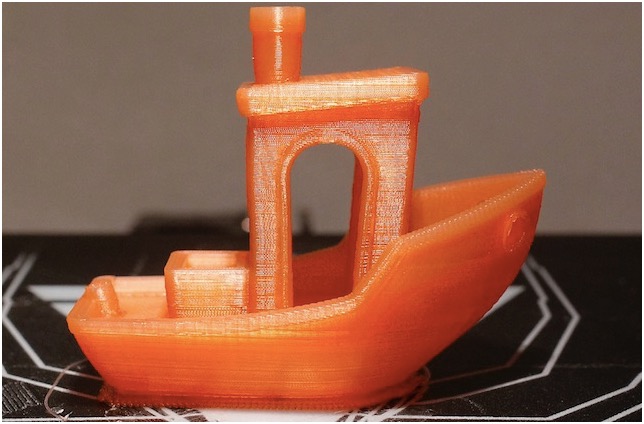
Jolly 3D printing torture test / 0,2mm par couche.
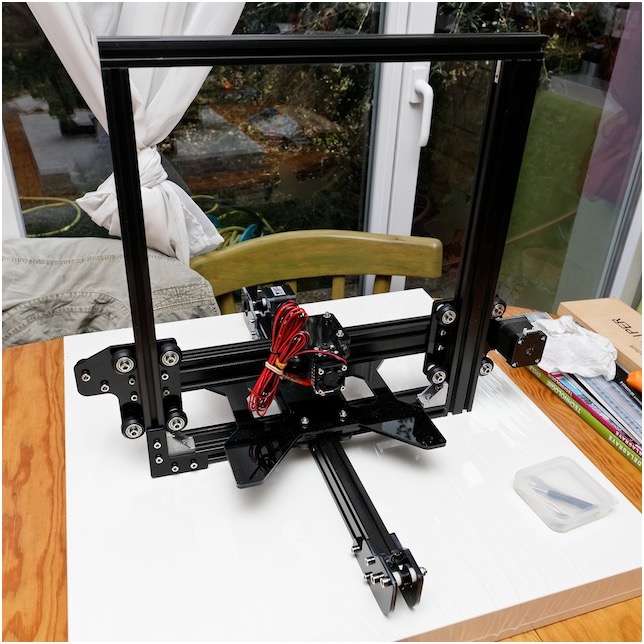
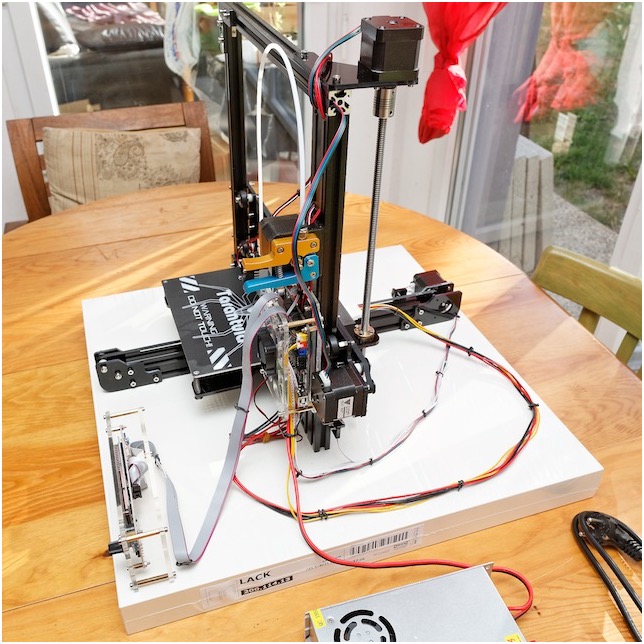
Montage de la TEVO Tarantula


Autant le dire tout de suite, la documentation papier est juste totalement insuffisante. il faut s’armer de patience et de tutos vidéo glanés sur YouTube pour s’en sortir sans trop de soucis.


Le montage en lui même n’est pas trop complexe pour peu de bien prendre son temps.
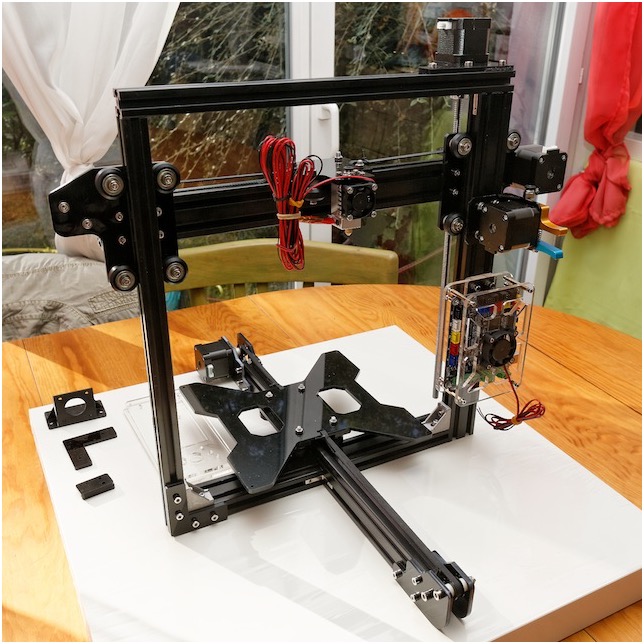
Et voilà la bête terminée...
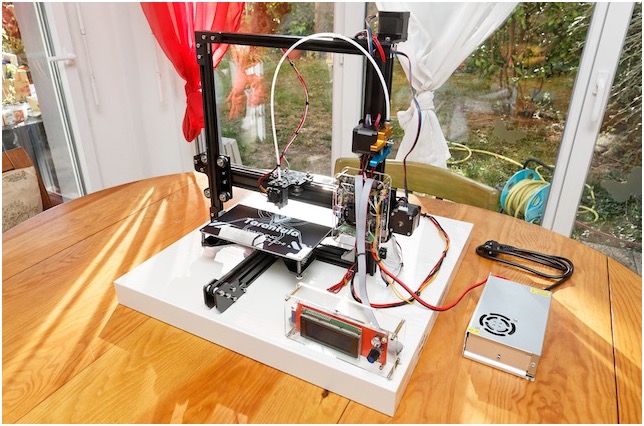
Moment de vérité: le premier print…
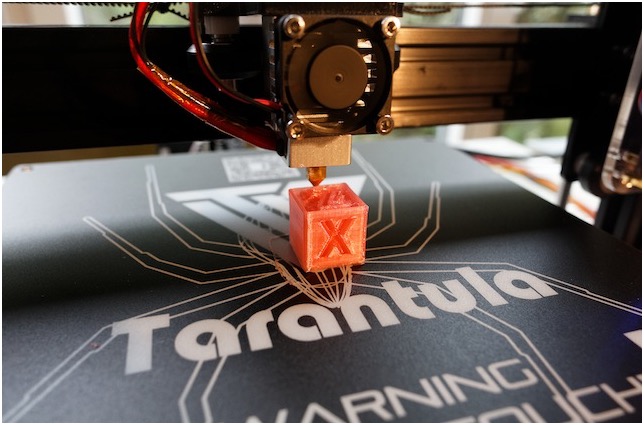
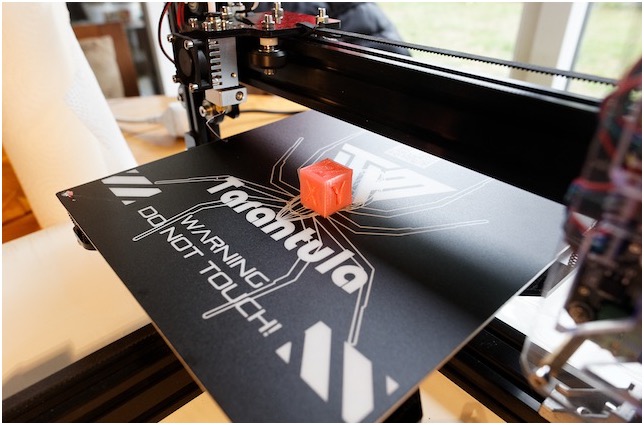
J’avoue que pour une première je suis assez bluffé.

Plus qu’à prendre le temps d’apprivoiser la bête et d’améliorer sa structure.
Imprimante 3D

En attendant son arrivée de Chine, autant lui préparer son vivarium… :)

Premier prototype de boitier côté moteurs
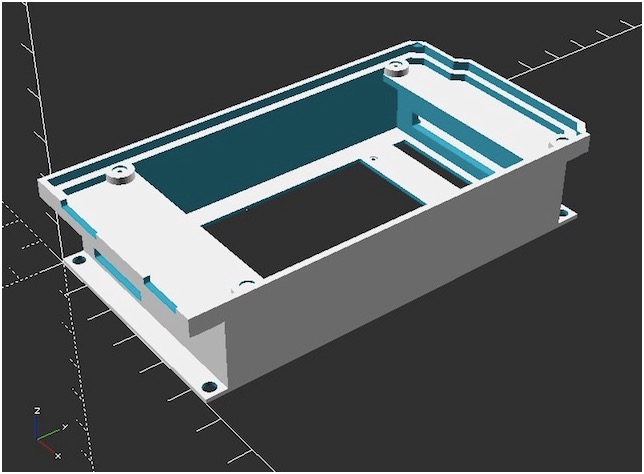
Installé en lieu et place de l’ancien boitier de commande Takahashi, il intègre à l’intérieur l’électronique de puissance et en façade un support destiné à accueillir ensuite un Arduino Mega…
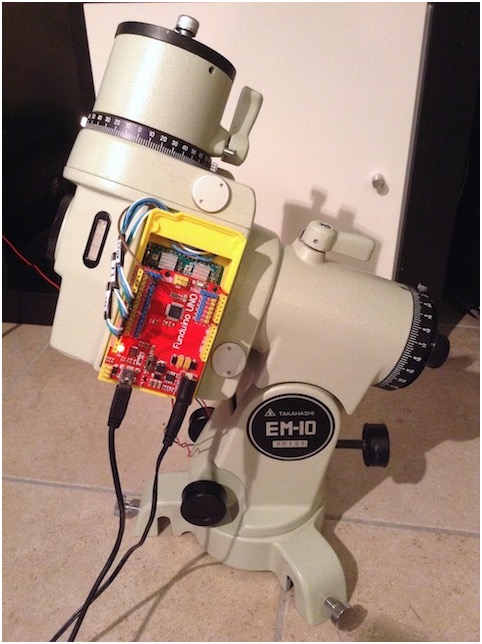
Pour l’instant j’utilise un modèle Uno avec réplication des ports pour me faciliter la connexion avec l’analyseur logique Saelae (non présent sur les photos).

Niveau Arduino, c’est dans l’immédiat très light avec le câblage du moteur d’ascension droite (Step, Direction, Enable) ainsi que du moteur de déclinaison (Step, Direction, Enable) et pour finir le câblage du microstepping (MS1, MS2, MS3) afin de gérer la résolution du microstepping à la volée pour les tests.
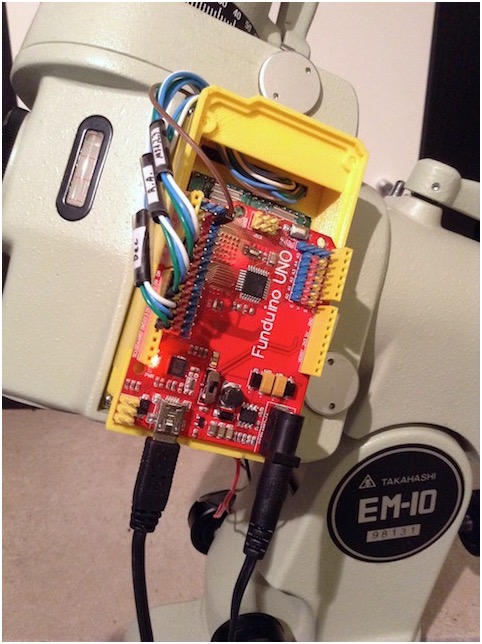
Derrière le Uno, à l’intérieur du boitier, on aperçoit la platine de puissance présentée précédemment.
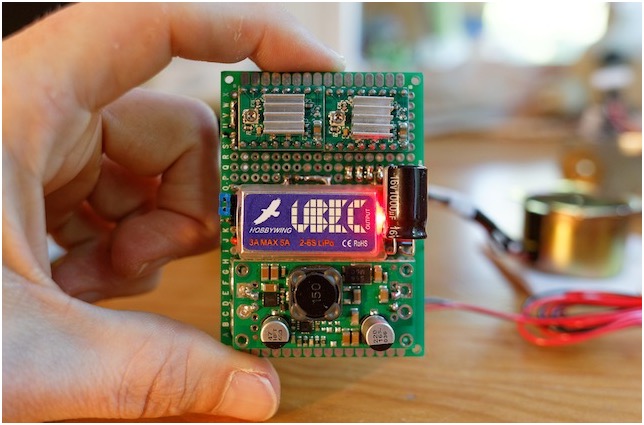
Cablage de l'electronique de puissance de l'EM-10 Taka.
Cablage de l'electronique de puissance de l'EM-10 Taka (suite).