


One more thing...

- Mon EM-10 USD II de 1998 à côté de ma nouvelle flambant vieille EM-200b de 1991. -
Surtout si ma dernière version de boitier a été pensée d’entrée pour être compatible au millimètre près... ;)

La motorisation poussive de l’EM-200b devra être revue mais cela aussi est à l’ordre du jour très prochainement sur l’EM-10.
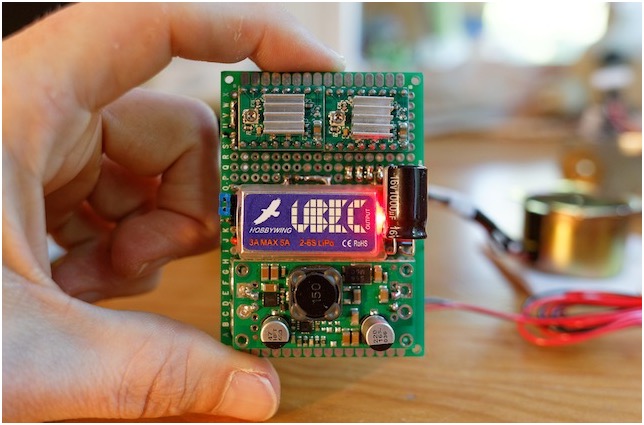
Cablage de l'electronique de puissance de l'EM-10 Taka (suite)
Pour les premiers tests, j’ai utilisé le moteur avec la démultiplication hors service et une alimentation stabilisée. Comme ça aucun risque. L’ensemble est pour l’instant piloté avec un Arduino Uno…

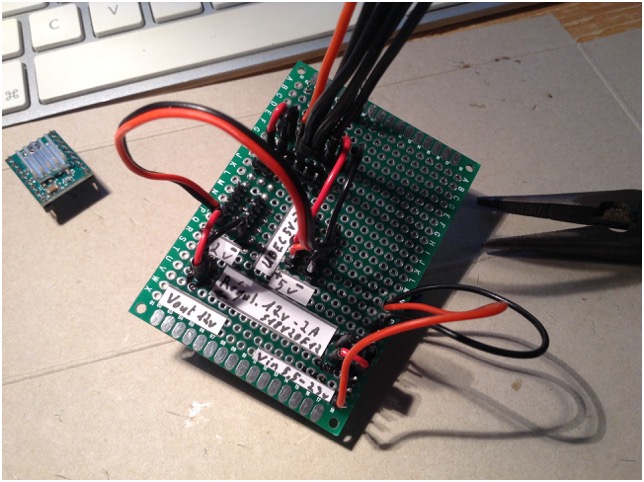
D’un point de vue électronique, rien de bien sorcier sur la platine: en bas un régulateur 12V pour alimenter les moteurs en puissance, un condensateur pour absorber les pics de tension lors des démarrages, un second régulateur UBEC pour l’alimentation 5v de la partie logique et enfin en haut avec leur radiateur les deux drivers A4988…
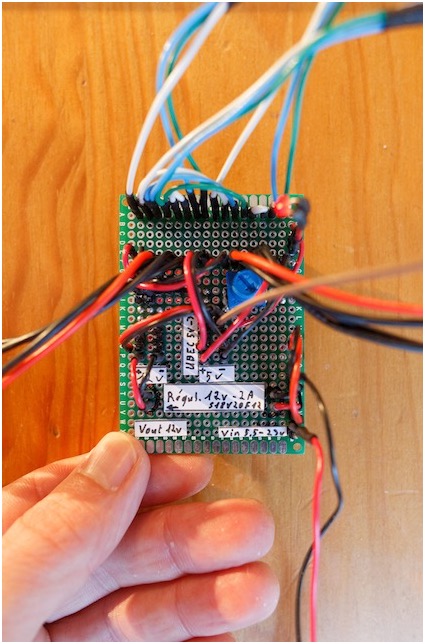
Vue arrière avec câblage, une led pour l’éclairage du viseur polaire et un potentiomètre de réglage...
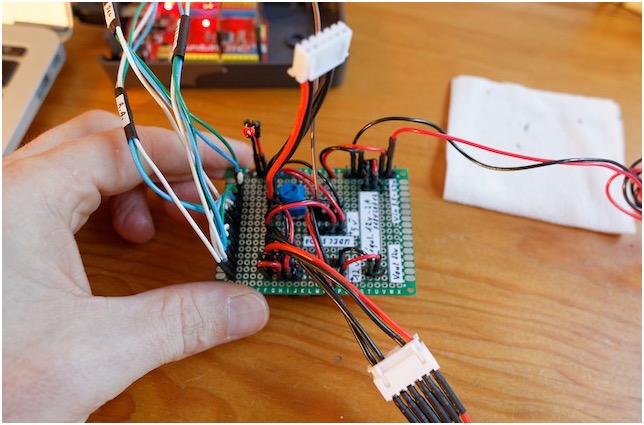
Cela peut paraitre un peu touffu car j’ai aussi câblé le microstepping pour une gestion logicielle en temps réel ainsi que l’activation/désactivation des drivers (Enable) pour limiter la conso lorsque les moteurs seront à l’arrêt mais rien de bien sorcier dans les faits...
Cablage de l'electronique de puissance de l'EM-10 Taka
Premier test d’un des drivers A 4988 en ascension droite. Rien ne crame… C’est bon signe… ;)
Le temps de mettre tout ça en forme et un article détaillé va venir sur les calculs pour la calibration des drivers avec les moteurs pas à pas d’origine.
Moteur P43GH démonté
De gauche à droite: le couvercle du carter, le moyeu avec son aimant permanent, les deux bobines de cuivre, le carter du bloc moteur avec son axe pour accueillir le moyeu...

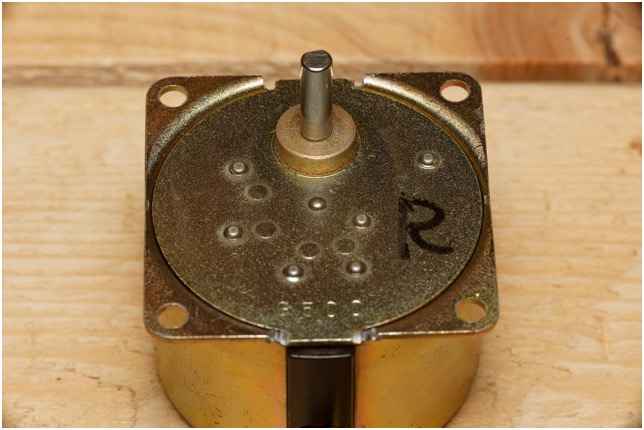
Le moteur entièrement clos avec sa démultiplication. Un léger coup de Dremel a été nécessaire pour désolidariser les pattes de la démultiplication…
Démultiplication retirée. On aperçoit le capot du carter…
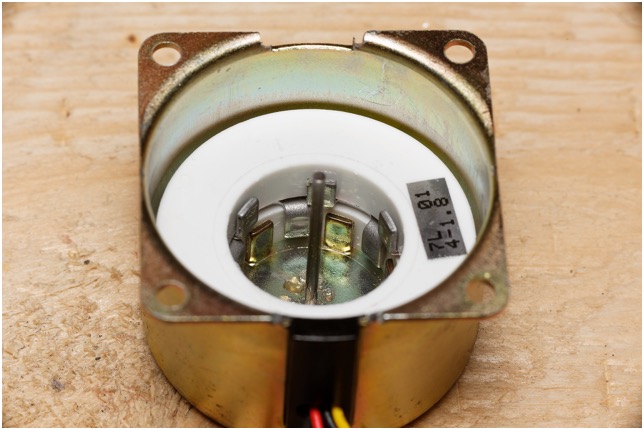
Retrait du capot. Au milieu, le moyeu en place. C'est en fait un simple aimant qui va tourner en fonction des phases.

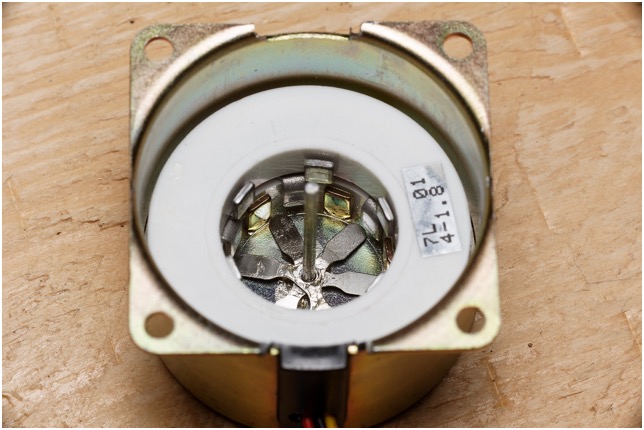
Moyeu retiré. On aperçoit 6 petites ailettes qui servent de "ressort" et évitent ainsi que le moyeu ne frotte sur le fond du carter lorsqu'il tourne...
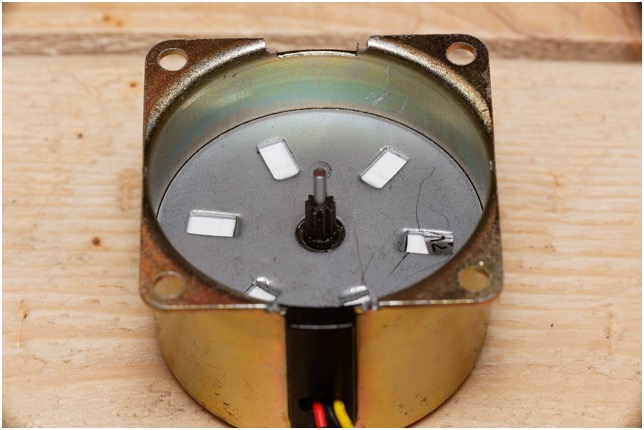
Et voici les petites plaques en métal des phases du moteur. C'est elles qui vont se polariser lorsque le courant passe dans les bobines (parties blanches)…
Sur le principe, cela fonctionne comme ceci…
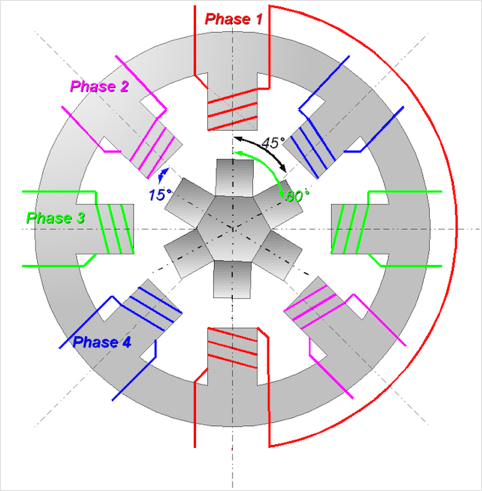
Moteur a six pas et quatre phases soit 24 pas complets (Source: wikipedia).
Bilan: tout est en parfait état côté moteur. Reste à voir si je peux lui faire une attelle avec un nouvel engrenage en impression 3D pour la pièce cassée de la démultiplication pour le rendre à nouveau opérationnel.
Démultiplication motorisation EM10 USD (suite)
Je constate que cette sous période est confirmée par des mesures de Christophe Demeautis avec une autre EM10 USD sur son site. Ce serait donc un phénomène récurrent avec le modèle USD...
La périodicité est un indice important. Une telle période est incompatible avec les engrenages externes (pignons moteur et pignon roue dentée) car elle est bien trop rapide. Il faut donc s’y coller côté démultiplication.
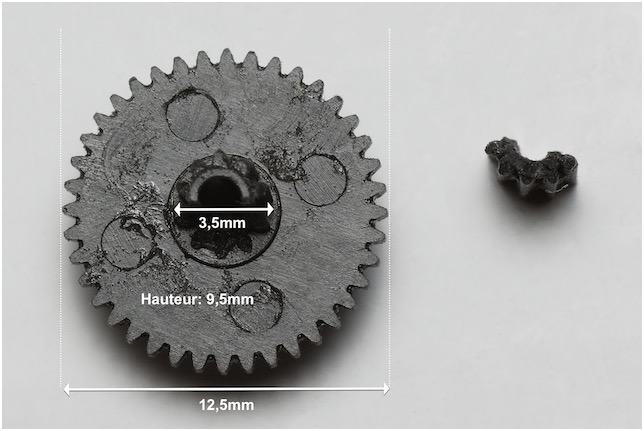
Partie un peu fastidieuse: le comptage des dents de chaque engrenage et des arbres. Pour me simplifier la tâche, j’ai opté pour de la photo macro de chaque engrenage. Voici un photo montage (engrenage masqués ajoutés en transparence) avec le comptage des dents…

Calcul de contrôle avec le logiciel Soulver pour 500 rotations (logiciel très pratique pour poser ce genre de calculs):
rotation_engrenage_moteur = 500 // 500 rotations
// Mouvement de dents
engrenage_moteur = rotation_engrenage_moteur × 10 // = 5 000 dents
engrenage_1 = engrenage_moteur/30 × 10 // = 1 666,6666666667 dents
engrenage_2 = engrenage_1/40 × 10 // = 416,6666666667 dents
engrenage_3 = engrenage_2/40 × 18 // = 187,5 dents
engrenage_4 = engrenage_3/30 × 10 // = 62,5 dents
engrenage_5 = engrenage_4/25 × 20 // = 50 dents
// Rotations des engrenages
rotation_engrenage_1 = engrenage_moteur/30 // = 166,6666666667 rotations
rotation_engrenage_2 = engrenage_1/40 // = 41,6666666667 rotations
rotation_engrenage_3 = engrenage_2/40 // = 10,4166666667 rotations
rotation_engrenage_4 = engrenage_3/30 // = 6,25 rotations
rotation_engrenage_5 = engrenage_4/25 // = 2,5 rotations
rotation_engrenage_6 = engrenage_5/50 // = 1 rotation
L’arbre moteur doit donc bien faire 500 tours pour un seul tour en sortie soit une démultiplication de 1/500. On est bon par rapport aux spécifications constructeur.
Reste à déterminer la périodicité de chaque engrenage pour recoupement avec l’erreur périodique de la monture. Il faut alors extrapoler sur 10min (période complète de la vis sans fin à vitesse solaire de référence). Avant toute chose, il nous faut le nombre de pas effectués en 10min soit: 25Hz*60*10 = 15 000 pas. Etant donné que nous somme en vitesse sidérale pour les mesures d’EP, le nombre de pas est en fait un peu plus élevé si l’on veut être précis: 15 041,068733 soit un ratio de 1,002738 que nous appliqueront en fin de calcul.
pas = 15000 // 15000 pas pour un tour de vis sans fin (si tout va bien ;) )
pas_moteur = 24 // Nombre de pas du moteur pour un tour complet
rotation_engrenage_moteur = pas/pas_moteur // = 625 rotations
// Mouvement de dents
engrenage_moteur = rotation_engrenage_moteur × 10 // = 6 250 dents
engrenage_1 = engrenage_moteur/30 × 10 // = 2 083,3333333333 dents
engrenage_2 = engrenage_1/40 × 10 // = 520,8333333333 dents
engrenage_3 = engrenage_2/40 × 18 // = 234,375 dents
engrenage_4 = engrenage_3/30 × 10 // = 78,125 dents
engrenage_5 = engrenage_4/25 × 20 // = 62,5 dents
engrenage_sortie_moteur = engrenage_5/50 × 36 // 45 dents
// Rotations des engrenages
rotation_engrenage_1 = engrenage_moteur/30 // = 208,3333333333 rotations
rotation_engrenage_2 = engrenage_1/40 // = 52,0833333333 rotations
rotation_engrenage_3 = engrenage_2/40 // = 13,0208333333 rotations
rotation_engrenage_4 = engrenage_3/30 // = 7,8125 rotations
rotation_engrenage_5 = engrenage_4/25 // = 3,125 rotations
rotation_engrenage_6 = engrenage_5/50 // = 1,25 rotations
rotation_vis_sans_fin = rotation_engrenage_6 × 36/45 // = 1 rotation de la vis sans fin (Oufff!!! On est bon!)
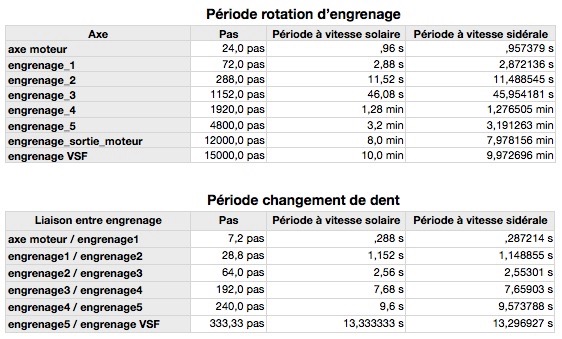
Nous voici à l’heure du bilan. Avec 7,8125 rotations (soit 7,83389 rotations rapporté à la vitesse sidérale) notre coupable semble tout indiqué: c’est l’engrenage 4 le fautif (gear_4 sur la photo) à la jonction entre engrenage alliage et engrenage plastique. La bonne nouvelle, c’est que nous avons maintenant une connaissance très précise de la sous période: 10 min / 7,8125 rotations / 1,002738=1,276506min. La moins bonne, c’est que cette erreur n’est pas sous multiple de l’erreur périodique principale ce qui va la rendre plus délicate à intégrer dans la correction PEC. Mais dans notre malheur, il y a une bonne chose à y regarder de plus près: 15000/7,8125 = 1920 pas. En d’autres termes: la sous période se reproduit tous les 1920 pas entiers.
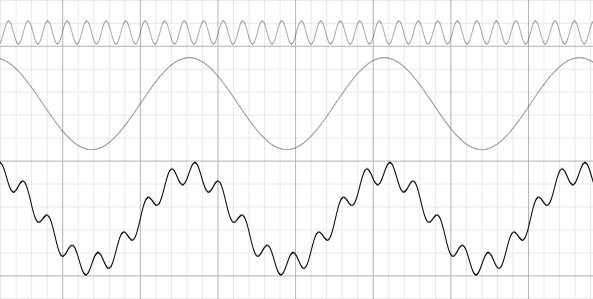
Pour terminer, voici l’extrapolation de toutes les périodes incluant rotation complète des engrenages (effet potentiel de voilage) et les changements de dents (effet potentiel d’erreur d’usinage des dents)…
Veni, vidi, vici pour cette étape. :D
Démultiplication motorisation EM10 USD
Qu’à cela ne tienne! Je me suis mis en quête d’un moteur hors service d’EM10 USD sur les forums astro. Et pour mon plus grand plaisir, Rémi Petitdemange d’Optique Unterlinden (importateur de la marque Takahashi) a répondu présent et m’a envoyé gracieusement un moteur pour étude. Un big big merci Rémi! ;)
Dès réception, la dissection a donc commencé…

Il y a plus qu’à compter tout ça et voir ce qu’il en ressort…

Affaire à suivre.
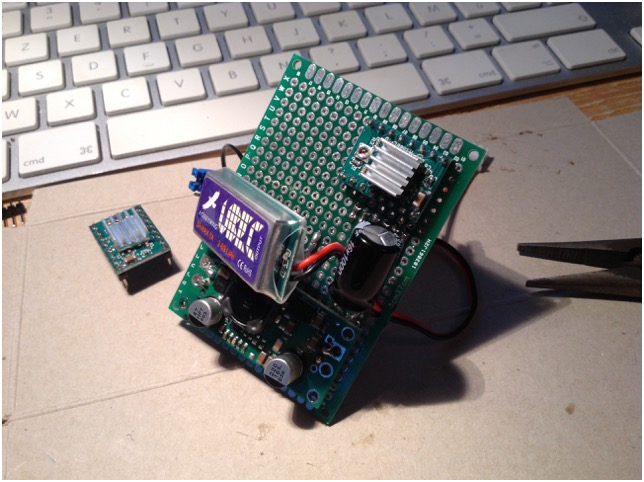
Début de prototypage de la partie puissance

A terme les composants seront positionnés vers l’intérieur de la monture pour minimiser l’épaisseur de la façade.
Pour l’instant tout n’y est pas encore. En bas nous avons un régulateur (qui va être remplacé par un modèle plus haut de gamme) et le bouton de mise en marche. Au milieu un condensateur pour amortir les pointes de surtension. Et en haut les deux drivers de moteur pas à pas A4988.
D’ailleurs au passage, voici un article très intéressant qui fait la part belle au A4988…
http://hackaday.com/2016/08/29/how-accurate-is-microstepping-really/
Il reste un peu de place sur le pcb pour la led du viseur polaire, un régulateur pour abaisser la tension 12v à 5V pour l’alimentation du Arduino de la raquette de commande, un connecteur vers la raquette. Je me tâte aussi à installer les connectiques ST4 et l’USB directement sur la monture. Cela éviterait les câblages externe sur la raquette. Réflexion à poursuivre… :)