


Test d'un écran tactile TFT 400x240
http://www.volumerate.com/product/450236
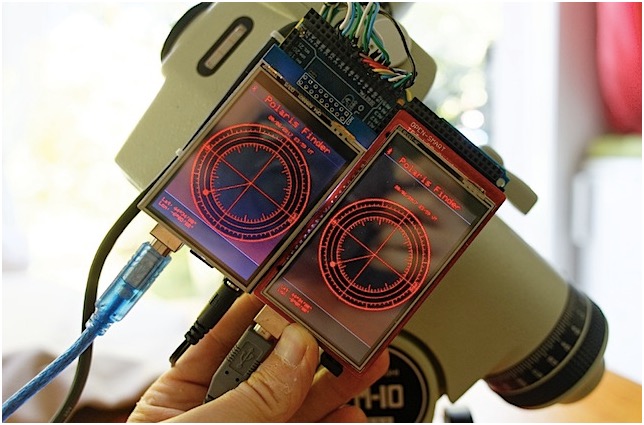
Par rapport au Kuman K60 2.8’’, j’aime:
- Ecran plus grand.
- Résolution de 400x240 contre 320x240 pour le Kuman.
- Meilleur contraste et meilleur angle de vue que le Kuman. On l’aperçoit sur la photo, le Kuman vire vite au bleuté dans les noirs dès qu’on est pas dans l’axe.
- Affichage plus rapide (environ 2x) que ce soit en dessin vectoriel ou lors du chargement de bitmaps depuis une carte micro SD.
- L’écran chauffe moins que le Kuman.
- On dispose d’une sonde de température LM75 intégrée.
- Malgré le gain en taille, ce modèle n’occulte pas les ports supérieurs du Mega...

Maj du 25/06 : le nouvel écran permet aussi l’accès au buffer d’affichage contrairement au Kuman. Il m’est ainsi possible de faire des captures d’écran en bmp sur la carte micro SD… :)
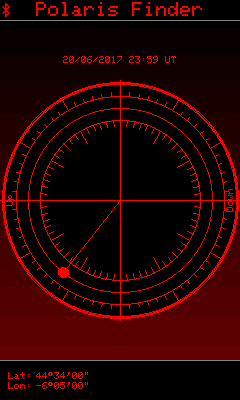
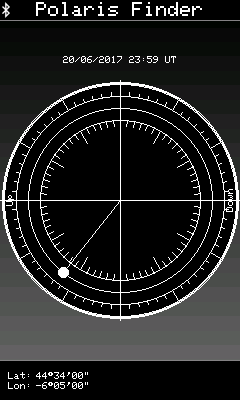
Ebauche de viseur polaire (mode nuit à gauche et mode jour à droite).
Avancée du cablage du proto V1...
- perçage de quelques trous dans le support afin de passer des serre-câbles et fixer le câble de la manette.
- fixation du Arduino avec des visseries qui vont bien.
- coup de cutter sur l’Arduino Mega afin de couper la liaison vers le polyfuse (alimentation 5v) de l’entrée USB.
- repiquage de l’alimentation 5v sur le régulateur UBEC du circuit de puissance.
- câblage d’un interrupteur marche/arrêt.
Pour le proto, je préfère garder un cordon d’alimentation et le repiquer sur le régulateur 5v plutôt que de câbler le arduino directement dessus. Je peux ainsi travailler sur le Arduino en le branchant à une simple alim 5v (vu qu’il n’y a plus d’alimentation par USB) sans alimenter les moteurs lorsque ce n’est pas nécessaire aux développements.



Installation d'un Arduino Mega et d'un LCD


Accélération/décélération: Sinus or not Sinus?
Soit t un nombre réel compris entre [0,1] représentant le temps d’accélération.
La réponse f(t) est un nombre réel compris entre [0,1] qui représente la vitesse du moteur en pourcentage.
Le graphique ci-après montre:
- Une accélération linéaire.
- Une accélération sinusoïdale parfaite.
- Une accélération sinusoïdale partielle.

La vitesse par accélération linéaire vaut:
f(t) = t
C’est la forme la plus simple. L’accélération est une simple fonction linéaire sur toute la plage. L’accélération est donc constante…
La vitesse par accélération sinusoïdale complète vaut:
f(t) = (sin(t*pi-pi*0.5)+1)*0.5
L’accélération est douce au départ, maximale en 0,5 et vient se radoucir sur la fin...
La vitesse par accélération sinusoïdale partielle vaut:
f(t) = sin(((2*t+1)*pi-pi)*0.25)
L’accélération est maximale au départ et vient se radoucir ensuite...
L’idéal va être des les mettre en oeuvre sur le terrain pour voir le ressenti en terme de confort d’utilisation.
Sega c'est plus fort que Taka...

Pour les amateurs du genre, le code est dispo sur mon github. Plus de détails ici…

Premier prototype de boitier côté moteurs
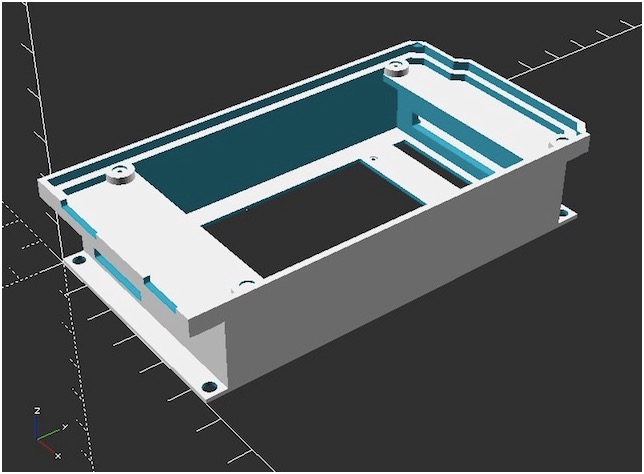
Installé en lieu et place de l’ancien boitier de commande Takahashi, il intègre à l’intérieur l’électronique de puissance et en façade un support destiné à accueillir ensuite un Arduino Mega…
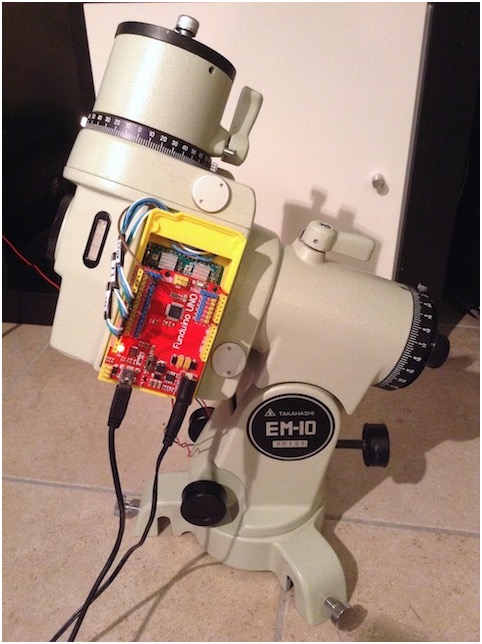
Pour l’instant j’utilise un modèle Uno avec réplication des ports pour me faciliter la connexion avec l’analyseur logique Saelae (non présent sur les photos).

Niveau Arduino, c’est dans l’immédiat très light avec le câblage du moteur d’ascension droite (Step, Direction, Enable) ainsi que du moteur de déclinaison (Step, Direction, Enable) et pour finir le câblage du microstepping (MS1, MS2, MS3) afin de gérer la résolution du microstepping à la volée pour les tests.
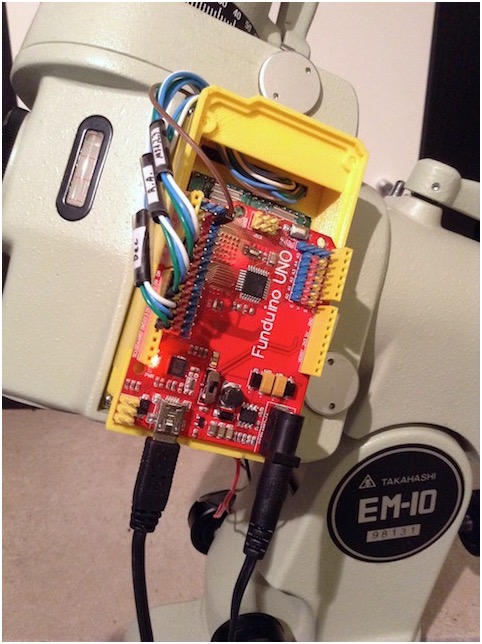
Derrière le Uno, à l’intérieur du boitier, on aperçoit la platine de puissance présentée précédemment.
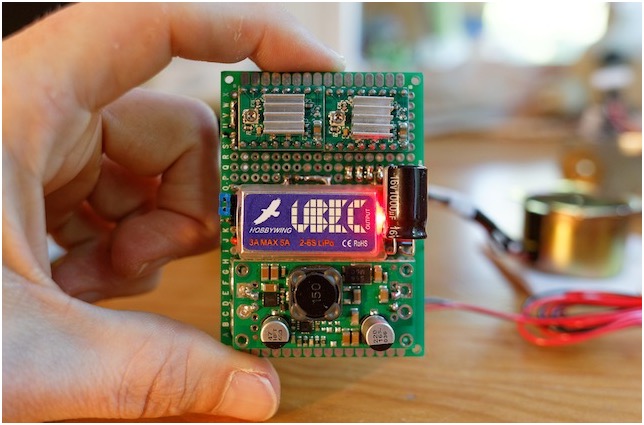
Cablage de l'electronique de puissance de l'EM-10 Taka.
Cablage de l'electronique de puissance de l'EM-10 Taka (suite).