






Cette section synthétise l'étude de la monture EM-10 USD d'un point de vue mécanique et électronique. Après analyse des spécifications des différentes montures Takahashi, la partie mécanique semble commune aux EM-2, EM-10 et EM-11. En ce qui concerne l'électronique, elle est spécifique au modèle USD.

Spécifications constructeur
Voici les données disponibles dans la documentation d'origine de l'EM10 USD Takahashi:
Motorisation:
- pas à pas quartz 50 pulsations/sec.
- rattrapage rapide Alpha 50x (la vitesse sidérale)
- rattrapage rapide Delta 750" d'arc/sec.
- rattrapage fins alpha +/- 1.1 à 1.9x la vitesse sidérale.
- rattrapage fins delta +/- 1.5 à 13.5" d'arc/sec.
- 500mA en vitesse sidérale et rattrapage lent.
- 2.5A en vitesse rapide.
- 12V continu.
Les moteurs
L'accès aux moteurs se fait de manière très simple en retirant le boitier de contrôle fixé par 4 petites vis cruciformes placées dans les angles.

A partir de là, on peut démonter la platine des moteurs qui est maintenue par deux grosses vis cruciformes (photo ci-dessous à gauche). L'opération prend moins d'une minute.



Côté motorisation, il s’agit de deux moteurs unipolaires 6 fils avec pour caractéristiques:
Malheureusement, sur le net impossible de trouver grand chose et le constructeur des moteurs contacté par mail n'a pas répondu à ma demande de documentation. Au mieux voici ce que j'ai trouvé sur un blog Japonais...
- 1 Volt.
- 2 Ohms.
- 24 pas.
- démultiplication de 1/500.
Malheureusement, sur le net impossible de trouver grand chose et le constructeur des moteurs contacté par mail n'a pas répondu à ma demande de documentation. Au mieux voici ce que j'ai trouvé sur un blog Japonais...

L'étape suivante consiste à mettre en place des connecteurs pour pouvoir brancher/débrancher l'électronique d'origine. J'ai opté pour des connecteurs de type JST SH 6 fils qui font parfaitement l'affaire en terme de gabarit…


Note: N'ayant pas envie de prendre le moindre risque avec ces vétérans du siècle dernier (1998). Les mesures et interprétations ci-après ont été effectuées avec un ami électronicien de métier. Merci Nicolas. ;)
Les fils des deux phases sont facilement repérables car dissociés à la sortie du moteur (cf photo ci-dessus à gauche):
Et la mesure des résistances entre fils à l'ohmmètre confirme les données des plaques avec pour la phase A:
- Phase A: noir, jaune, rouge.
- Phase B: bleu, blanc, rouge.
Et la mesure des résistances entre fils à l'ohmmètre confirme les données des plaques avec pour la phase A:
- 2 ohms entre noir et rouge.
- 2 ohms entre jaune et rouge.
- 4 ohms entre noir et jaune.
- 2 ohms entre bleu et rouge.
- 2 ohms entre blanc et rouge.
- 4 ohms entre bleu et blanc.

L'électronique de commande

Contre toute attente, le passage à l'oscilloscope montre que Takahashi c'est permis des libertés sur la partie électronique.

Les moteurs 1 volt sont en fait alimentés en 12V!!! Voilà qui va bien nous faciliter la tâche pour le choix du driver de moteur pas à pas. Cela explique sans doute au passage la phrase d’avertissement dans la documentation d’origine de Takahashi. Je cite:
« Attention: une sollicitation prolongée (plus d’une minute en continu) des déplacements en vitesse rapide 50 X peut endommager le circuit électronique de votre monture. »
Dans le cadre du pointage automatique (goto), il faudra sans doute en tenir compte et ajouter une sécurité dans le code. Il serait toutefois intéressant de savoir si le risque concerne les moteurs ou bien l'électronique de commande. Dans le second cas, le problème n'en serait plus un avec la nouvelle électronique Arduino.
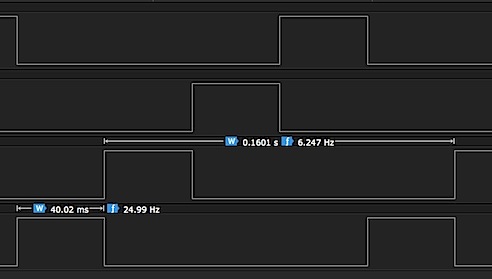
Deuxième mesure intéressante, la période des impulsions en vitesse sidérale au niveau d’une bobine du moteur unipolaire en AD est de 6,244Hz. Nous allons pouvoir utiliser cette mesure dans le paragraphe mécanique pour déterminer la vitesse de suivi réelle.
Troisième mesure, la période des impulsions en vitesse rapide (50x la vitesse sidérale) est évaluée à 312 Hz ce qui est cohérent...
Deuxième mesure intéressante, la période des impulsions en vitesse sidérale au niveau d’une bobine du moteur unipolaire en AD est de 6,244Hz. Nous allons pouvoir utiliser cette mesure dans le paragraphe mécanique pour déterminer la vitesse de suivi réelle.
Troisième mesure, la période des impulsions en vitesse rapide (50x la vitesse sidérale) est évaluée à 312 Hz ce qui est cohérent...

Note: la fréquence "bobine" doit être multipliée par 4x pour obtenir la fréquence (ou plutôt la durée) d'un pas moteur. - Là encore, merci Nicolas. :) -
En même temps, quand on y pense, c'est assez logique. Cette simulation sur 4 bobines moteur parle d'elle même…
En même temps, quand on y pense, c'est assez logique. Cette simulation sur 4 bobines moteur parle d'elle même…
La mécanique
Coté mécanique, un engrenage de 36 dents est monté sur l'axe moteur. Il entraine un second engrenage de 45 dents monté sur l'axe de la vis sans fin. Pour finir, la vis sans fin entraine l'axe principal (AD ou Dec) via une roue dentée de 144 dents.

Le calcul suivant nous permet de déterminer l’erreur résiduelle:
// Mesures
FrequenceBobine = 6,244 Hz
FrequencePas = FrequenceBobine × 4 = 24,976 Hz
// Caractéristiques moteur
NombreDePasMoteur = 24 pas
Demultiplication = 1/500 = 0,002
VitesseMoteur = 60 × FrequencePas / NombreDePasMoteur × Demultiplication = 0,12488 tr/min
// Engrenages intermédiaires
NombreDeDentsEngrenageMoteur = 36 dents
NombreDeDentsEngrenageVisSansFin = 45 dents
DémultiplicaitionEngrenages = NombreDeDentsEngrenageMoteur/NombreDeDentsEngrenageVisSansFin = 0,8
// Vis sans fin
VitesseVisSansFin = VitesseMoteur × DémultiplicaitionEngrenages = 0,099904 tr/min
NombreDeDentsRouteDentéeAD = 144 dents
// Vitesse sidérale monture
PeridodeVitesseSideraleMonture = NombreDeDentsRouteDentéeAD/VitesseVisSansFin = 1 441,38 min
// Vitesse sidérale parfaite : 23h56m04s
PeriodeVitesseSideraleParfaite = 23*60+56 + 4/60 = 1 436,07 min
// Erreur (ratio théorie/pratique)
(1-PeridodeVitesseSideraleMonture/PeriodeVitesseSideraleParfaite) × 100 = -0,37%
A noter que si l'on prend une « vitesse sidérale parfaite » arrondie à 24h, l’erreur résiduelle tombe à -0,096%. Il est donc plus que probable que les ingénieurs de Takahashi se soient simplifiés la tâche à l’époque. On peut d'ailleurs le vérifier d'après la documentation (voir début d'article) indiquant 50 pulsations/seconde. Pour les calculs, je suis parti du postulat d'un moteur "fullstep" ou pas entier. Hors la monture fonctionne en 1/2 pas. La fréquence de pas "théorique" est donc de 25 Hz tout rond en pas entiers. Si l'on reprend les calculs avec FrequencePas=25, on tombe sur une erreur parfaitement nulle. CQFD. :)
25Hz est donc leur fréquence de référence (vitesse de suivi solaire) qu'ils ont ensuite légèrement modulée pour la vitesse sidérale.
// Mesures
FrequenceBobine = 6,244 Hz
FrequencePas = FrequenceBobine × 4 = 24,976 Hz
// Caractéristiques moteur
NombreDePasMoteur = 24 pas
Demultiplication = 1/500 = 0,002
VitesseMoteur = 60 × FrequencePas / NombreDePasMoteur × Demultiplication = 0,12488 tr/min
// Engrenages intermédiaires
NombreDeDentsEngrenageMoteur = 36 dents
NombreDeDentsEngrenageVisSansFin = 45 dents
DémultiplicaitionEngrenages = NombreDeDentsEngrenageMoteur/NombreDeDentsEngrenageVisSansFin = 0,8
// Vis sans fin
VitesseVisSansFin = VitesseMoteur × DémultiplicaitionEngrenages = 0,099904 tr/min
NombreDeDentsRouteDentéeAD = 144 dents
// Vitesse sidérale monture
PeridodeVitesseSideraleMonture = NombreDeDentsRouteDentéeAD/VitesseVisSansFin = 1 441,38 min
// Vitesse sidérale parfaite : 23h56m04s
PeriodeVitesseSideraleParfaite = 23*60+56 + 4/60 = 1 436,07 min
// Erreur (ratio théorie/pratique)
(1-PeridodeVitesseSideraleMonture/PeriodeVitesseSideraleParfaite) × 100 = -0,37%
A noter que si l'on prend une « vitesse sidérale parfaite » arrondie à 24h, l’erreur résiduelle tombe à -0,096%. Il est donc plus que probable que les ingénieurs de Takahashi se soient simplifiés la tâche à l’époque. On peut d'ailleurs le vérifier d'après la documentation (voir début d'article) indiquant 50 pulsations/seconde. Pour les calculs, je suis parti du postulat d'un moteur "fullstep" ou pas entier. Hors la monture fonctionne en 1/2 pas. La fréquence de pas "théorique" est donc de 25 Hz tout rond en pas entiers. Si l'on reprend les calculs avec FrequencePas=25, on tombe sur une erreur parfaitement nulle. CQFD. :)
25Hz est donc leur fréquence de référence (vitesse de suivi solaire) qu'ils ont ensuite légèrement modulée pour la vitesse sidérale.