


Le piMac et son dock quasi achevé...


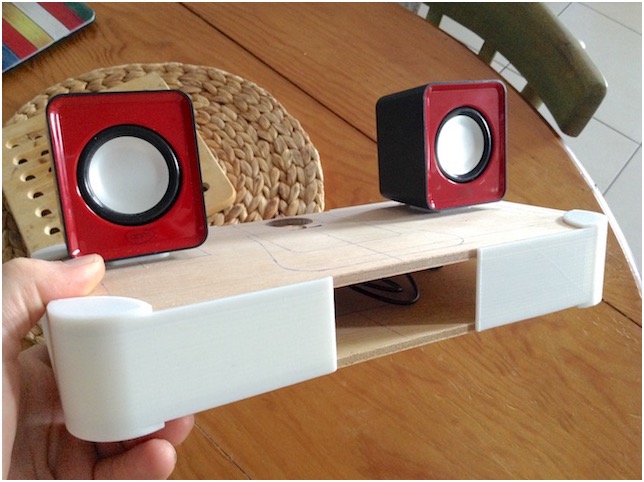

Encore quelques finitions et ce piMac aura tout d’un grand! ;)
piMac: un Raspberry avec un petit gout de pomme...

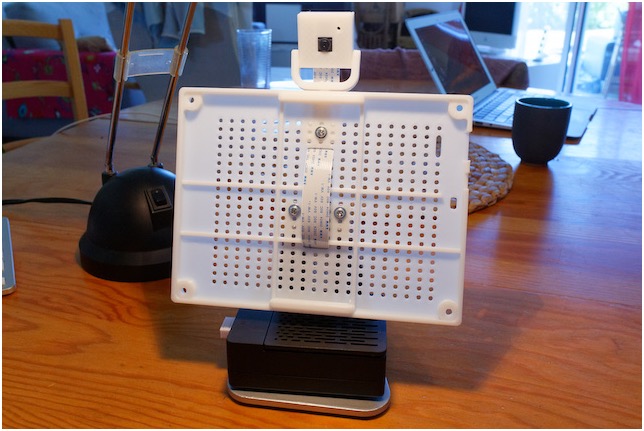
Installation de la caméra PI V2 8mp...
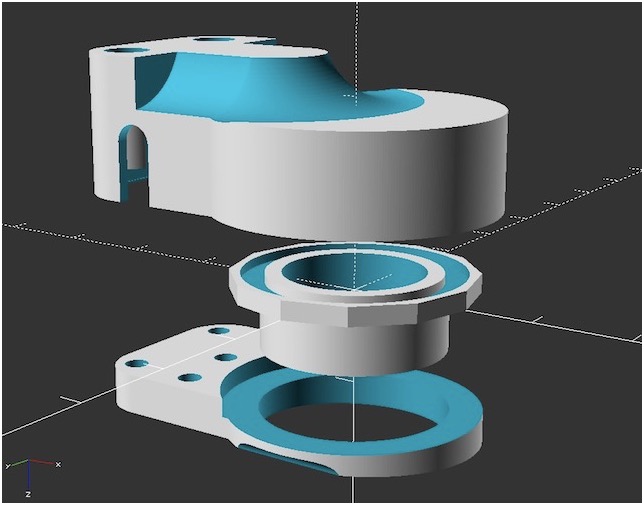
Pied bombé couleur alu...

Ecran tactile 7’’...
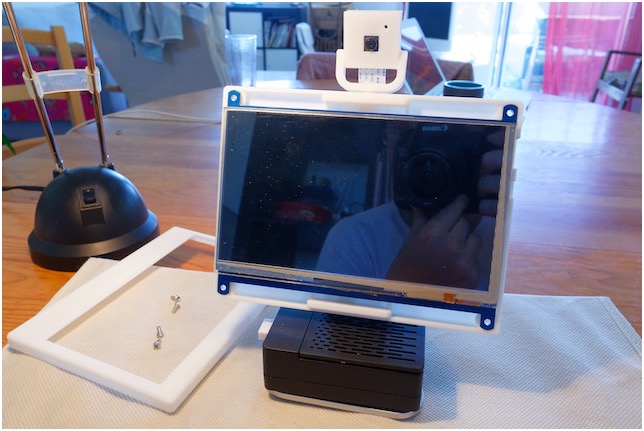

Toute ressemblance avec un iMac blanc des années 2000 serait bien évidement une totale non coïncidence. En atteste cette photo de famille... ;)

De là à en faire également une machine pour retrogamin(g) sous Recalbox, c’est tentant aussi... :D

Si le concept vous plait, les fichiers 3D sont disponibles sur mon thingiverse...
http://www.thingiverse.com/thing:3743598
Masque anti aigrettes pour le CN-212
Alors l’œil à l'oculaire disparaitre tu les verras.
Newton ou lunette visuellement plus tu ne sauras.
Quoi suis-je?
Le masque anti aigrettes!
La manip est inspirée de l'article de Serge Bertorello:
http://serge.bertorello.free.fr/antiaigr/antiaigr.html
Et hop! Directement du concepteur au consommateur...





Plus qu’à tester sur le ciel. :)
Edit: résultat en demi teinte pour cette première version. Les aigrettes disparaissent bien mais au profit d'une « boule à facettes » pas forcément très esthétique...

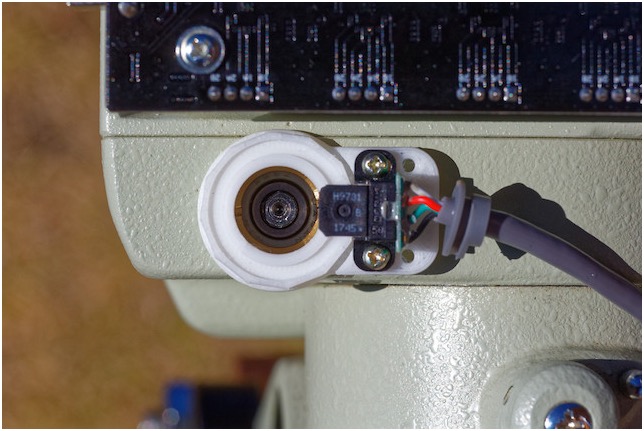
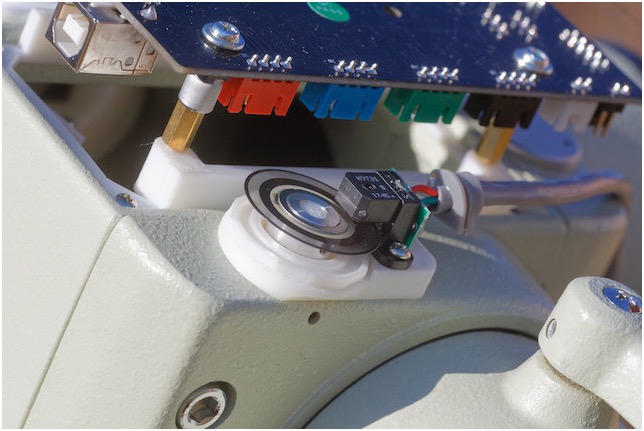
Encodeur pour l'axe R.A.
Le sushi c'est que rien n'est droit sur cette monture! Qu'à cela ne tienne: passage ne mode "haute couture » sous OpenSCAD...
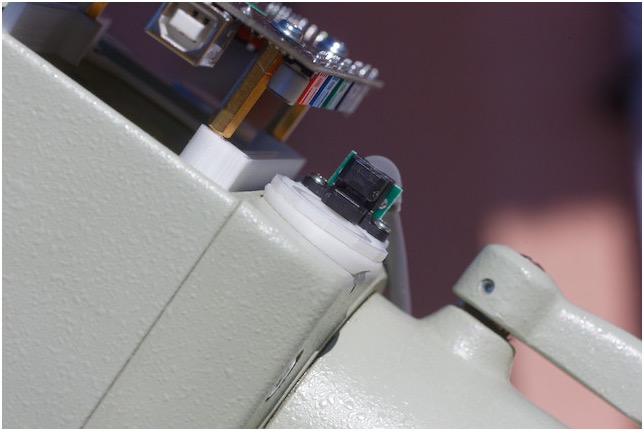

C’est moi ou bien il a un petit côté Star Trek Enterprise ce cache? :D

Là où cela devient intéressant c'est que mon idée est d'essayer d'utiliser l'encodeur pour asservir la vitesse (et non la position) et, si cela marche, compenser les erreurs périodiques en amont de la vis sans fin (démultiplication du moteur et les deux engrenages de transmission). Cela permettrait de mettre au point un PEC double étage mêlant l'asservissement de vitesse en cascade avec une mémorisation PEC classique pour la vis sans fin. Vous me suivez?
Premier prototype de boitier côté moteurs
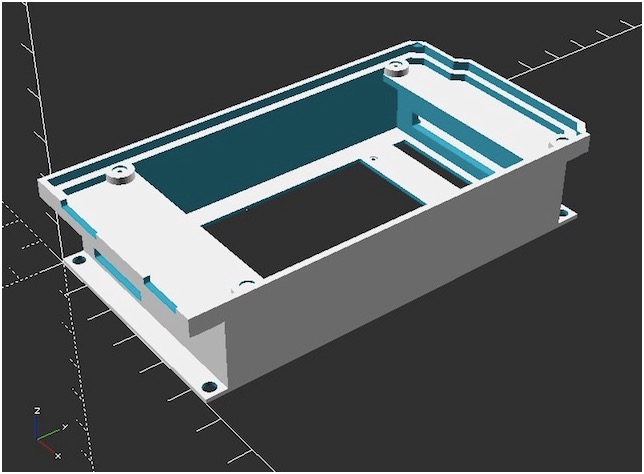
Installé en lieu et place de l’ancien boitier de commande Takahashi, il intègre à l’intérieur l’électronique de puissance et en façade un support destiné à accueillir ensuite un Arduino Mega…
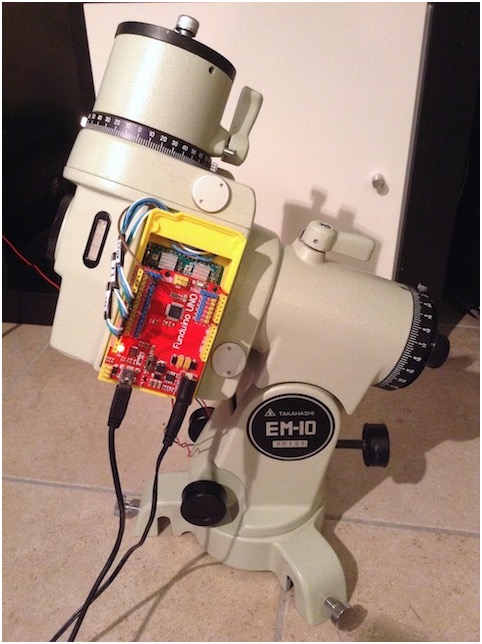
Pour l’instant j’utilise un modèle Uno avec réplication des ports pour me faciliter la connexion avec l’analyseur logique Saelae (non présent sur les photos).

Niveau Arduino, c’est dans l’immédiat très light avec le câblage du moteur d’ascension droite (Step, Direction, Enable) ainsi que du moteur de déclinaison (Step, Direction, Enable) et pour finir le câblage du microstepping (MS1, MS2, MS3) afin de gérer la résolution du microstepping à la volée pour les tests.
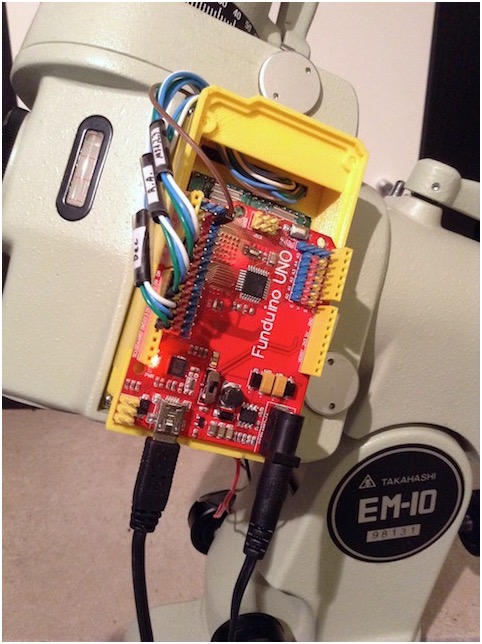
Derrière le Uno, à l’intérieur du boitier, on aperçoit la platine de puissance présentée précédemment.
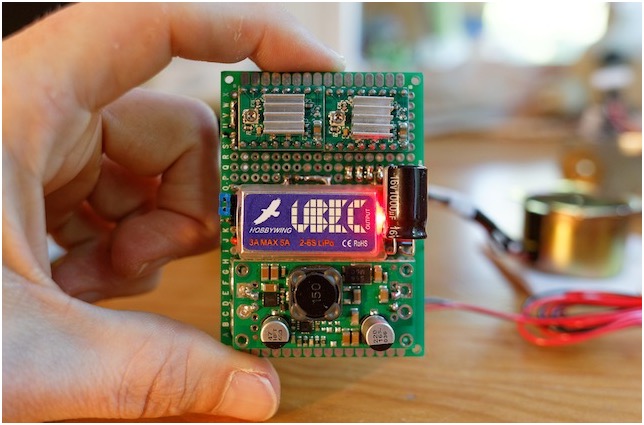
Cablage de l'electronique de puissance de l'EM-10 Taka.
Cablage de l'electronique de puissance de l'EM-10 Taka (suite).
Modélisation 3D de la télécommande infra rouge
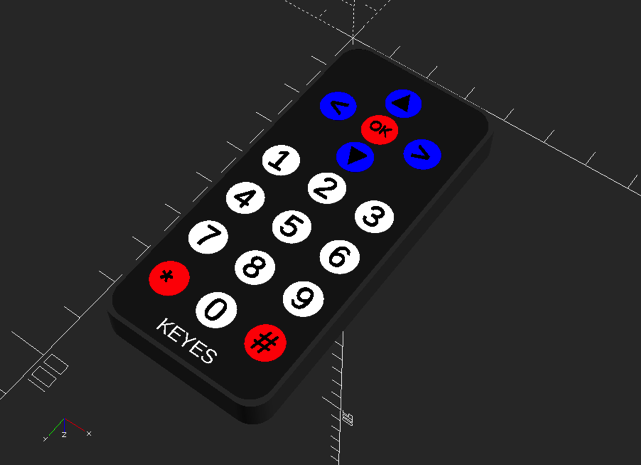
Dans mon esprit, l’idée serait de l’intégrer à une plus grosse raquette de commande câblée au télescope et contenant le Arduino et un afficheur LCD. On pourrait ainsi l’utiliser dans son compartiment ou bien la détacher pour piloter manuellement le télescope à distance...

Chaque pièce est mesurée précisément à l’aide d’un pied à coulisse pour coller au plus prêt de la réalité. Voici l’afficheur LCD modélisé…

Et son intégration de la raquette. On peut même paramètrer le texte affiché! :)

Prototypage de la raquette de commande avec OpenSCAD


Pas assez parlant? Ok. Une connaissance de mon Fab lab ayant eu la bonne idée de m’initier à OpenSCAD, voici donc un début d’ébauche que je vais peaufiner avec le temps (le squelette en carton est ici représenté en bleu)…

A terme le but est de modéliser l’ensemble des pièces électroniques pour contrôler leur intégration et au final réaliser la raquette de commande avec une imprimante 3D.
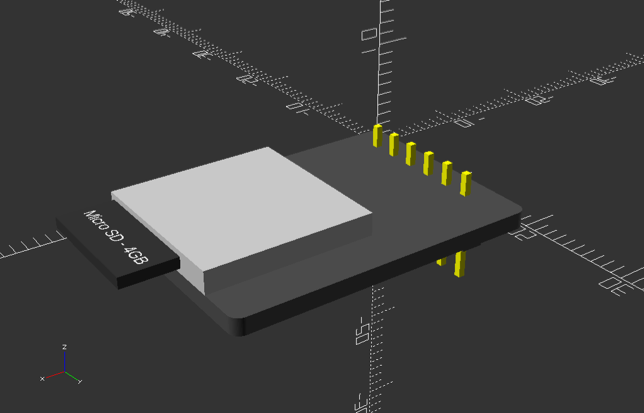
DFRobot MicroSD

https://www.amazon.fr/gp/product/B01C8EWDDW/
Couplé à une carte 4GB, cela fera parfaitement l’affaire pour stocker la base d’objets célestes.
Voici la modélisation 3D sous OpenSCAD…


Et hop un GPS pour le projet

Le module est piloté via la librairie TinyGPS ou TinyGPS++. Et vous savez quoi? Ca le fait carrément! Latitude/Longitude/Altitude et bien sûr horloge interne synchronisée par satellite. Voilà qui va remplacer avantageusement l’horloge avec pile bouton de mon kit de base. :)
Niveau connectique, c’est on ne peut plus basique: deux pins d’alimentations (VCC et GND) et deux pins de communications (Tx/Rx) pour la communication série des infos de la puce GPS vers le Arduino.
Seul petit bémol, le module ne maintient pas l’horloge interne en cas de coupure prolongée.
Voici la modélisation 3D sous OpenSCAD…